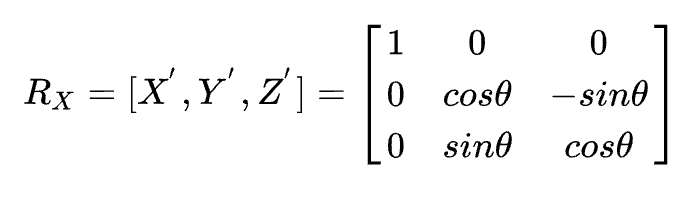
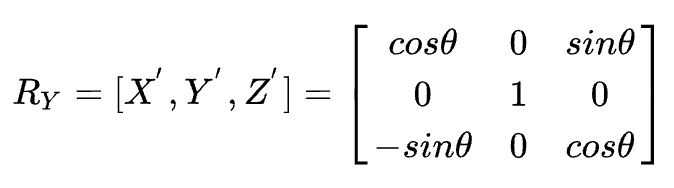
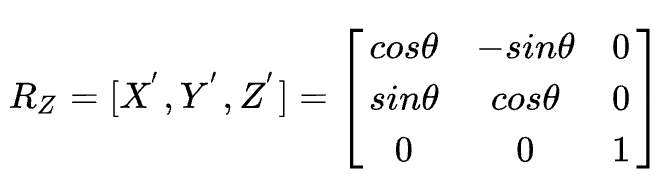
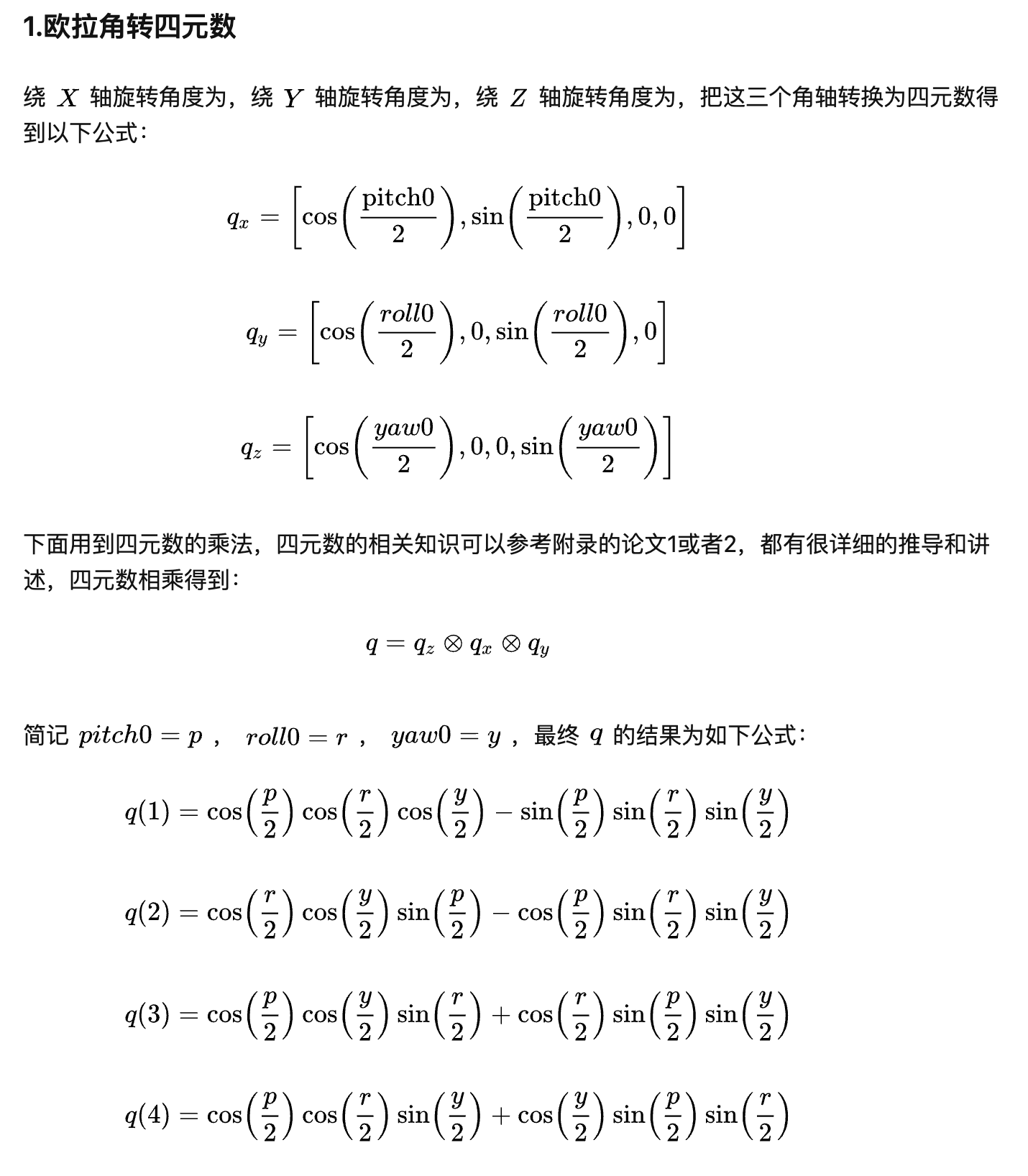
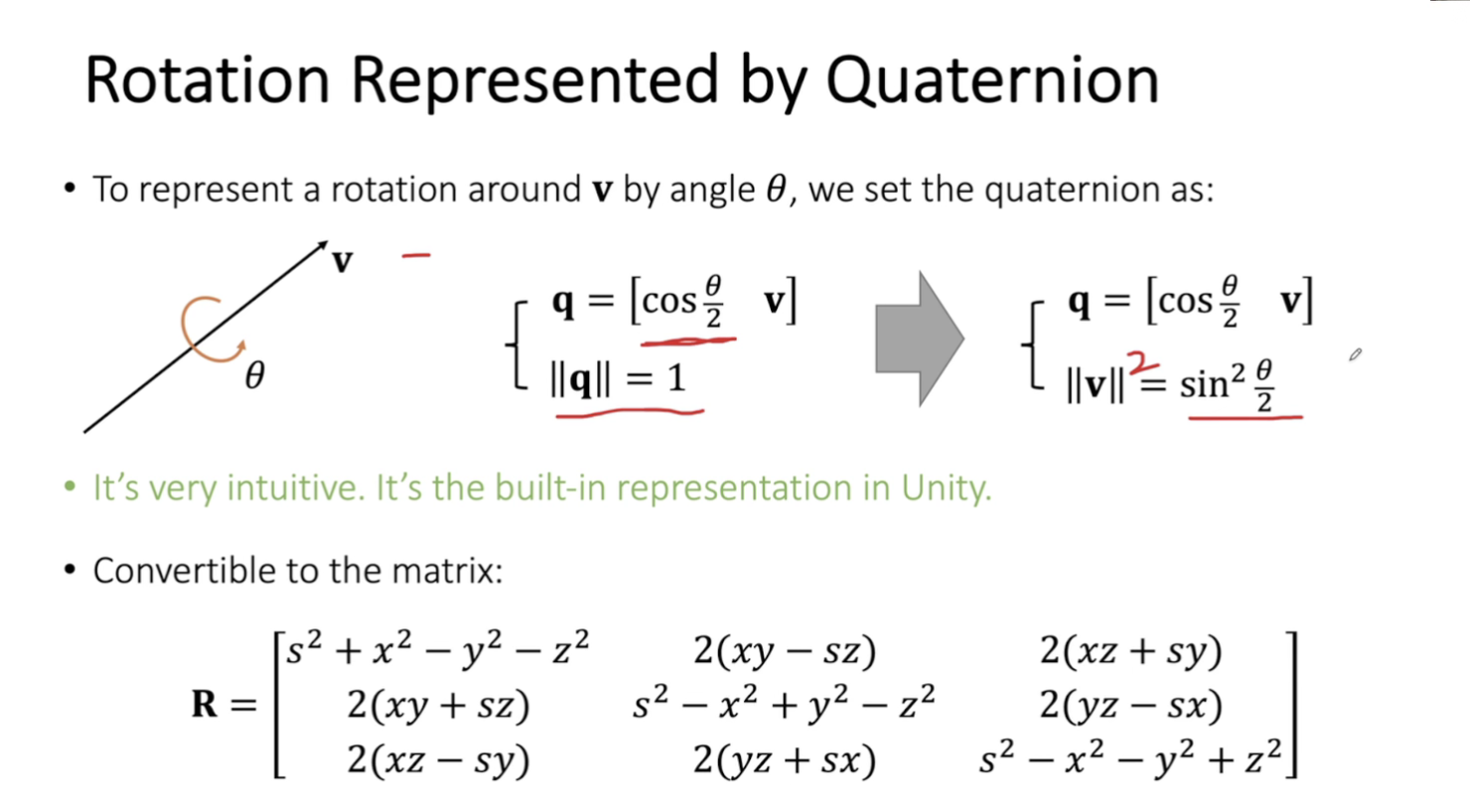
# 旋转相关# 欧拉角 to 旋转矩阵# 欧拉角变四元数# 四元数四元数是个超复数满足 i^2 = j2=k2 = -1,四元数 P=a+bi+cj+dk(I 绕 x 旋转,j 绕 y 旋转,k 绕 z 旋转)abcd 均为实数,虚数是 z = a+bi. , i^2 = -1 图形学笔记